

Las zonas marinas cubiertas de hielo, como el Ártico, son lugares de la Tierra difíciles de investigar y que requieren herramientas altamente especializadas para explorar y tomar muestras. La topografía oculta y subacuática del hielo es una variable difícil de medir, si bien se han hecho avances en el pronóstico del futuro del Ártico y de la Antártida, así como de otros lugares poco accesibles del globo.
Hasta ahora, los vehículos tradicionales operados por control remoto se han visto limitados en su capacidad para explorar estas regiones porque dependen de amarres pesados ??y blindados que limitan la capacidad del vehículo para alejarse del hielo, que se ve perturbado por un rompehielos que pueda maniobrar cerca del entorno.
Pero esto ha empezado a cambiar gracias a una gran innovación: un vehículo híbrido operado a distancia construido por la Institución Oceanográfica Woods Hole (WHOI), que tomó la primera muestra automatizada realizada por un brazo robótico en el fondo marino.
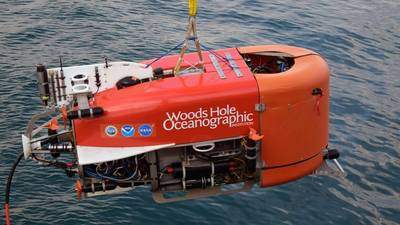
Este vehículo híbrido de control remoto (HRUV) llamado Neurus puede llegar a las partes más profundas del océano, puede viajar hasta 40 kilómetros por debajo del agua y recibe señales de control y transmite datos a través de una delgada correa de fibra óptica.
También incluye un conjunto completo de sensores acústicos, químicos y biológicos para investigar el entorno submarino, así como un brazo manipulador electrohidráulico con siete funciones. El vehículo está diseñado para sumergirse a 2.000 metros (6.500 pies) debajo de la superficie.
La primera misión de este vehículo se llevó a cabo hace un mes: exploró el volcán Kolumbo, un volcán submarino activo frente a la isla de Santorini, en Grecia. Ahora se puede ver la imagen que ha tenido como resultado la expedición.
"Para un vehículo tomar una muestra sin un piloto conduciendo, fue un gran paso adelante", dice Rich Camilli, científico asociado de WHOI que lidera el desarrollo de la tecnología de automatización como parte del programa de investigación interdisciplinaria de Ciencia y Tecnología Planetaria de la NASA (PSTAR). "Uno de nuestros objetivos era prescindir del joystick, y pudimos hacer exactamente eso".

Al igual que con los autos sin conductor, entregar el volante a un algoritmo de computadora puede ser "inquietante". Lo mismo ocurre con los robots oceánicos, especialmente cuando necesitan trabajar en entornos difíciles y peligrosos.
Camilli formó parte de un equipo internacional de investigadores en una expedición destinada a aprender sobre la vida en el ambiente hostil y cargado de químicos de Kolumbo, y también a explorar en qué medida los científicos pueden entregar los controles a los robots oceánicos y permitirles explorar sin intervención humana.
Ligeramente más pequeño que un coche Smart, NUI estaba equipado con un software de planificación automatizado basado en Inteligencia Artificial (AI), incluido un planificador llamado "Spock", que permitió al explorador decidir qué sitios visitar en el volcán y tomar muestras de forma autónoma.
Gideon Billings, un estudiante invitado de la Universidad de Michigan cuya investigación de tesis se enfoca en tecnologías automatizadas, obtuvo el honor de usar su código para recolectar la primera muestra automatizada, que era de un parche de sedimento del fondo marino rico en minerales de Kolumbo. Dio una orden al manipulador autónomo y, momentos después, una manguera de muestra de sorbos conectada al brazo robótico se extendió hasta la ubicación precisa de la muestra y absorbió la suciedad.
Billings dice que este nivel de automatización será importante para la NASA, ya que buscan desarrollar tecnologías para explorar mundos oceánicos más allá de nuestro sistema solar. "Si tenemos esta gran visión de enviar robots a lugares como Europa y Encélado (las lunas de Júpiter y Saturno, respectivamente), en última instancia, deberán trabajar de forma independiente de esta manera y sin la ayuda de un piloto", dice.